前節で挙げた”悪魔の装置第一号”について、もう少し詳しく検討してみよう。
私は装置内部の動きを、信号を中心に考えて大きく2つに分類した。
1つは外からの条件が信号をどのように制御するか(外部->信号)ということ、もう一つは信号がどのように外にある対象を操作するか(信号->外部)ということである
前者の(外部->信号)という働きをする装置を総称して「ゲート」、後者の(信号->外部)という働きをする装置を総称して「ハンドル」と呼ぶことにしよう。
(どちらもここだけの特別な呼び名である。)
擬人的な言い方をすれば、
・信号と経路は、神経のようなもの
・ゲートとは、外部からの刺激を受ける感覚器官のようなもの
・ハンドルとは、刺激に対する反応、あるいは外部へ働きかけを行う筋肉のようなもの
である。
この4要素に「気体分子」や「ピストン」、それらを収容する「等温壁でできた箱」などが加わって装置全体を形成する。
1: 「信号」とは、情報の伝達が可能で、ある経路内を外から何の供給も受けずに減衰することなく伝搬する物理的実体のことである。 信号は1個2個と離散的に数えられる状態でなければならない。 例えば、電気パルス、ソリトンは信号として使うことができるが、長時間かけて電圧が徐々に変動するなどといった状態は不適である。 (誰が信号を数えるのかというと、信号の観測装置~ここでは「ゲート」や「ハンドル」と呼んでいる装置が数えるわけだ。 「どの程度短時間ならパルスといえるのか」「どの程度以上の電圧なら1個と見なされるのか」は結局「ゲート」装置や「ハンドル」装置の精度に依存する。必ずしも信号が量子である必要はない。) 典型的な信号は光や電子ビーム、電気的波動、運動する質点(ボール)などである。 特定の化合物を伝搬物質として利用する方法は(生物の体内でよく用いられている方法)、常に外から新しい物質や自由エネルギーを供給しなければならないので不適である。 ここで考察する装置では、信号は1個だけ使用する。
2: 「経路」とは、信号の通り道のことである。 経路は1次元である。 (球面波や平面波の伝わる空間ではなく線だということ。 又は、ただ1つのパラメーターで信号の位置が特定できるということ。) 経路は空間内の任意の場所に配置することができる。 ”減衰することなしに”信号を伝達しなければならないので、経路は「摩擦のない物体」や「電気抵抗0の線」でできていなければならない。 また、経路は「完全な断熱壁」で外部の熱ゆらぎから遮断されていなければならない。 (こういった理想的な物体が現実に存在するかどうかはひとまず置いておいて、ここでは理論上の極限値として存在を認めることにする。) 信号が外部から熱ゆらぎの影響を受けるのは経路の開いた端(入口と出口)においてであって、閉じた経路内の信号は熱ゆらぎの影響を受けない。 経路は双方向に、順方向にも逆方向にも同じように信号を通さなければならない。 経路は分岐したり合流したりすることはできない。
3:
「ゲート」とは、外部から信号を制御する装置のことである。
経路上を伝搬する信号に対して我々が為しえる最も基本的な操作は、
「経路をある1点で分断し、信号の通過を阻む」
「分断された2つの経路を接合し、信号が通過できるように仕立てる」
という2つである。
この分断、接合の働きを担う装置がゲートだ。
ゲートの状態には、信号の通過を許可する開と、通過を禁止する閉の2状態しかない。
半分通すとか、選択的に通すといったことはできない。
ゲートの働きは、要するに電気スイッチと同じである。
分断された経路~閉じたゲートに入った信号は、反射して戻ってくるものとする。
(分断点で止まって消えてしまうのではない。)
ゲートは経路と同様に双方向で、どちらの向きにも通過(あるいは反射)することができる。
一方の向きだけ選択的に通過、あるいは遮断することはできない。
このゲート自身の操作に、自由エネルギーの消費は伴わないものとする。
なぜならゲートは経路を切り貼りするだけで、中身の信号に直接力を加えるものではないからである。
現実にはスイッチを動かすにはわずかばかりの力は必要だが、この力は(たとえ熱ゆらぎの下にあろうとも)理論上は極限まで0に近づけることが可能だ。※
(熱ゆらぎの下だとゲートの開閉がゆらぐのではないかと懸念されるかもしれないが、熱ゆらぎが直接影響するのは以下に述べる”ゲートの開閉条件”であって”ゲート自身”ではない。
もし、熱ゆらぎによってゲートの開閉条件がゆらぐのであればゲート自身もゆらぐし、熱が加わっても開閉条件が変化しなければゲート自身がゆらぐことはない。)
ゲートの開閉はいったい誰が行なうかについてだが、これは人間や意志ある知性体が行なうのではなく、特定の物理的条件に委ねることにする。
特定の物理的条件とは「ある状態になったら」ということである。
例えば「部屋が明るくなったなら」とか「特定の部分に圧力が加わったら」などのことである。
ゲートを閉じる物理的条件は、ゲートを開ける物理的条件の補集合でなければならない。
簡単にいうと「開けるのと反対のことをすれば閉じる」ということだ。
例えば「明るくなったなら開く」ゲートは「暗くなったら閉じる」。
「明るくなったら開き、圧力が加わったら閉じる」ゲートはルール違反である。
なぜなら「暗くて圧力が加わった」ゲートがどうなるかわからないからだ。
(ただし複合条件「明るくかつ圧力が加わったときだけ開く」ならばOKだ。これなら「暗くて圧力が加わったとき」ゲートは閉じるのだとはっきりわかるのだから。)
ゲートの開閉は物理的条件の状態のみによって一意に決まり、条件の変化する順序には依存しない。
(コンピューター風に表現すると if (condition) then { Gate OPEN } else { Gate Close } といったものである。)
以上をまとめて、「ゲート」とは、ある特定の物理的条件に対応して、信号の通過許可、通過禁止を決める装置のことである。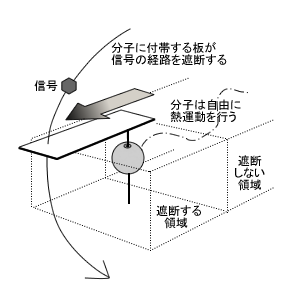 実際に、あらゆる物理的条件に対して適当なゲートが作成できるかどうかは明らかではない。
条件によってはとてつもなく複雑なゲート装置を作成しなければならないかもしれない。
しかし、ここでは「摩擦のない物体」と同様に理想的な立場を採って、あらゆる物理的条件に対して適当なゲート装置が用意できることにしよう。
ここで考察する装置では「ある物体が特定の空間領域に含まれていれば」という物理的条件を用いる。
用意するゲートは2つ、「熱運動する分子が特定の空間領域に入ったら開く」ゲートと、「ピストンがある位置に達したら開く」ゲートである。
これらのゲートが実際どのような造りになってるかは深く追及しない。
例えば「分子が部屋の壁に触れたら」ということでも良いし、分子自身がゲートの一部となっていてそのままスイッチの働きをするということでも良いだろう。
理屈の上で矛盾のないゲート装置を考えるのはさほど困難ではないので、適当に想像力を働かせて欲しい。
実際に、あらゆる物理的条件に対して適当なゲートが作成できるかどうかは明らかではない。
条件によってはとてつもなく複雑なゲート装置を作成しなければならないかもしれない。
しかし、ここでは「摩擦のない物体」と同様に理想的な立場を採って、あらゆる物理的条件に対して適当なゲート装置が用意できることにしよう。
ここで考察する装置では「ある物体が特定の空間領域に含まれていれば」という物理的条件を用いる。
用意するゲートは2つ、「熱運動する分子が特定の空間領域に入ったら開く」ゲートと、「ピストンがある位置に達したら開く」ゲートである。
これらのゲートが実際どのような造りになってるかは深く追及しない。
例えば「分子が部屋の壁に触れたら」ということでも良いし、分子自身がゲートの一部となっていてそのままスイッチの働きをするということでも良いだろう。
理屈の上で矛盾のないゲート装置を考えるのはさほど困難ではないので、適当に想像力を働かせて欲しい。
4:
「ハンドル」とは、入力された信号に応じて外部の対象を操作する装置のことである。
重要な条件は、ハンドル装置全体が可逆でなければならないことである。
もしハンドルに入った信号が入ったきりで出てこなかったら可逆にはならない。
このため、ハンドルには2つの経路接点~入口と出口が用意されている。
信号が入口から入って出口から抜ける間に、ハンドルは特定の操作Aを行なう。
この反対に、信号が出口から入って入口から抜けたときには、ハンドルは操作Aとは全く逆の操作 ̄Aを行なう。
どちらが「入口」でどちらを「出口」とするかは便宜上のとり決めで、実際には対称である。
ハンドルの行なう操作も可逆なものに限定する。
又、ハンドル自身の動作に自由エネルギーの消費は伴わないこととする。
ハンドルが行なう操作についても自由エネルギーを消費しないものに限る。
(可逆なのだからそうなる。)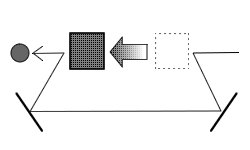 ハンドルの具体例として、対象となる物体を移動するハンドルを考えてみよう。
このハンドルは信号が入口から出口に抜ける間に物体をa地点からb地点に移動し、反対に出口から入口に抜ける間に物体をb地点からa地点に移動するものとする。
信号には光、物体には光を完全反射する小球を想定しよう。
静止した物体に光を当てると、ビリヤードの玉突きのように光は反射し、静止した物体は動き始める。
(光子は運動量を持っているので。)
反射した後の光を先回りさせて、今度は物体の反対側から当てると、先の反射と全く逆の過程を経て物体は静止する。
このように、物体の移動は2回の反射によって実現できる。
ここで考察する装置で用いるハンドルは1つだけ、「ピストンを移動する装置」である。
この装置の中身は上に記した「物体を移動するハンドル」の様なものを想定すれば良いだろう。
ハンドルの具体例として、対象となる物体を移動するハンドルを考えてみよう。
このハンドルは信号が入口から出口に抜ける間に物体をa地点からb地点に移動し、反対に出口から入口に抜ける間に物体をb地点からa地点に移動するものとする。
信号には光、物体には光を完全反射する小球を想定しよう。
静止した物体に光を当てると、ビリヤードの玉突きのように光は反射し、静止した物体は動き始める。
(光子は運動量を持っているので。)
反射した後の光を先回りさせて、今度は物体の反対側から当てると、先の反射と全く逆の過程を経て物体は静止する。
このように、物体の移動は2回の反射によって実現できる。
ここで考察する装置で用いるハンドルは1つだけ、「ピストンを移動する装置」である。
この装置の中身は上に記した「物体を移動するハンドル」の様なものを想定すれば良いだろう。
「信号」「経路」「ゲート」「ハンドル」、これら4つの要素を組み合わせて悪魔の装置の全体像を構成しよう。 装置には1つの信号と1つの閉じた経路がある。 経路上には2つのゲートと1つのハンドルが置かれている。 以上は装置の動きを制御するコントロールブロック、人間で言えば神経回路に相当する。 制御される側の実体ブロック、人間で言えば骨格や筋肉に相当する部分は、熱運動する気体分子が1個だけ入っているピストンである。 2つのゲートには名前をつけた方が便利なので、それぞれ「トラップゲート」「リカバーゲート」と呼ぶことにしよう。 トラップゲートは気体分子を捕える「罠」に相当する。 トラップゲートが開く条件は「気体分子がある特定の領域内に入っているとき」である。 分子が特定の領域内に収まったという状態は、一個だけの分子から成る気体が特定の領域内に圧縮されたことと同じだ。 つまり、この特定の領域は、気体をピストンで圧縮したときの領域に相当している。 そこで、この領域のことを”圧縮領域”と呼ぶことにしよう。 装置全体の動きを考慮すると、実はトラップゲートの開閉条件にもう一つ付け加える必要があるのだが、これについては後述する。 気体分子が圧縮領域に入ったら、すかさずピストンをセットして、圧縮された気体の膨張から仕事を取り出せる状態を作りたい。 この、これから仕事を取り出そうとする状態のことを”圧縮状態”と呼ぼう。 圧縮状態におけるピストンの位置、つまりピストンがいちばん奥まで押し込まれている位置を”圧縮位置”としよう。 この反対に、気体が膨張しきって仕事を取りだし終えた後の状態を”膨張状態”、そのときのピストンの位置、つまりピストンがのびきったときの位置を”膨張位置”とする。 ピストンを圧縮位置にセットするのはハンドルの役目である。 このハンドルは、膨張位置にあるピストンを外して圧縮位置にもってくる。 つまりこのハンドルは、一度仕事を取りだし終えたピストンを”巻き戻して”再スタートさせるわけだ。 (ハンドルは可逆だから、もし信号が逆から入ってきたら、圧縮位置から膨張位置まで仕事を全く取り出すことなく”速送り”するわけだ。) もう一つのゲート、リカバーゲートの開閉はピストンの位置によって決まる。 リカバーゲートを設けた意図は「分子が圧縮領域に入るまで待機する待ちモード」と「圧縮された気体から仕事を取り出す作業モード」の2モードを切り分けることにある。 この2つのモードを識別するには、ピストンの位置に着目するのが妥当であろう。 仕事を取り出す以前、ピストンが圧縮位置にあるとき、リカバーゲートは開く。 それ以外のピストンの位置~膨張する気体がちょっとでもピストンを動かしたら、以後リカバーゲートは閉じるものとする。
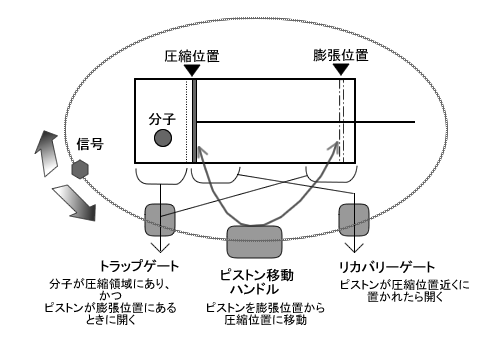
以上のゲートとハンドルを、閉じた経路上に
「(スタート)→トラップゲート→ピストン移動ハンドル→リカバーゲート→(一周してトラップゲートに戻る)」
という順序に配置する。
1: 一番最初は膨張状態、つまりピストンがのびきった状態からスタートする。 このとき信号はトラップゲートの手前の経路上、つまりリカバーゲートとトラップゲートの間の経路上にある。 (上に”スタート”と記した所にある。) 両方のゲートが閉じていれば、信号は両ゲートで反射して経路上をいったりきたりする。 これが”信号が待機している”状態である。
2: ここで気体分子が圧縮領域に入ってトラップゲートが開けば、信号はゲートを通過してピストン移動ハンドルに入る。 (この仕掛けだと、トラップゲートが開いている間に、信号がハンドルの方に進行していなければトラップゲートの通過はできない。 せっかくトラップゲートが開いたのに、運悪く信号が経路の反対側のリカバーゲートのあたりにいるということもあるだろう。 トラップゲートが開いたからといって必ずしも信号がピストン移動ハンドルに入るわけではない。 しかし、たとえこのような”運の悪い状況”があったとしても装置全体の働きに支障はきたさない。 なぜなら、運の悪かったその回はあきらめて、運良く信号がゲートを通過するまで気長に待てばよいのだから。 このトラップゲートの罠が待っているのは、単に分子が圧縮領域に入ることではなく、「分子が圧縮領域に入ってなおかつ信号がハンドルの方に進行している」という状況なのである。)
3: 信号がピストン移動ハンドルを通過すると、ピストンは膨張位置から圧縮位置に移動する。 このとき気体分子は圧縮領域に入っているはずなので、分子のとりこぼし(分子がピストンの反対側に入ってしまうこと)はない。 信号がピストン移動ハンドルに入ったとき、ピストンは必ず膨張位置になければならない。 しかし、ピストンは熱ゆらぎによって押し戻されることがあるので、必ず膨張位置に留まっている保証はない。 そこで、トラップゲートにもう一つの条件「ピストンが膨張位置にあるときだけ開く」を追加することになる。 つまり、トラップゲートの開閉条件は「気体分子が圧縮領域内にあって、かつピストンが膨張位置にあるとき開く」ということである。
4: 信号がピストン移動ハンドルを出た直後、ピストンは圧縮位置にセットされているのでリカバーゲートは開いている。 信号はリカバーゲートを通過して最初の待機していた状態(トラップゲートとリカバーゲートの間の往復)に戻る。 リカバーゲートが開いているのは、ピストンが圧縮位置にセットされた直後だけだ。 その後、気体分子がピストンを押せばリカバーゲートは閉じるので、信号がトラップゲートで反射して戻ってきてハンドルに逆流する事態は防がれる。 また、気体がピストンを押して仕事を取り出している最中にトラップゲートが開いてしまうことはない。 なぜならトラップゲートはピストンが膨張位置に達しない限り開かないからである。
5: 仕事を取りだし終えて、ピストンが膨張位置に達すれば最初の状態に戻る。 これで1サイクル終了となる。
以上で装置が順方向に動く様子を一通り説明したわけだが、逆方向の動きも見てみなければ片手落ちというものであろう。 この装置は全て可逆な要素から構成されているので、装置全体も可逆なはずだ。
1: 信号がトラップゲートとリカバーゲートの間を往復して、”待機している”状態から始めよう。 ここでピストンが伸びきって”膨張状態”になれば上記の順方向の動きが始まるのだが、反対にピストンが熱ゆらぎによって押されて”圧縮状態”となると、装置は逆方向に動き始める。 ピストンが”圧縮位置”にくると、リカバーゲートが開く。 信号はリカバーゲートを通過してピストン移動ハンドルに逆から入ることになる。
2: 信号がピストン移動ハンドルを逆向きに通過すると、ピストンは圧縮位置から膨張位置へと移動する。
3: ピストンがハンドルから出た直後は、分子はまだ圧縮位置にいて、かつピストンは膨張位置にあるので、トラップゲートが開いている。 信号はトラップゲートを通過して最初の待機していた状態に戻る。 これで一巡した。
この逆向きの一巡で何が行なわれたのかというと「ピストンを押して気体を圧縮した」ことになる。 ピストンを押した仕事は気体の温度を上げることに使われるのだが、気体を囲む等温壁を通じて最終的には熱となって外界に放出される。 結局、この装置は順方向に動けば熱->仕事という変換を、逆方向に動けば仕事->熱という変換を行なうわけだ。 (くどい様だが、ここでいう順逆という呼び方は便宜的なもので、実際には順方向も逆方向も同等な権利を持っている。)
「悪魔の装置第一号」の、一通りの説明は以上である。
以下に、悪魔の装置第一号について想定される疑問点について補足しよう。
| ポイントその1 | |
|
それは気体が圧縮するか膨張するかによる。 この装置を順方向に動かしているのは「気体が等温膨張してピストンを押す」過程である。 反対に「気体がピストンに押されて等温圧縮」されれば装置は逆方向に動く。 気体が膨張するか、圧縮するかは何で決まるのかというと、気体を押しつけている力、つまりピストンにかかる力の大きさによって決まる。 ピストンにかかる力が0なら、気体は確実に自由膨張するので装置は100%順方向に動くことになる。 ただし、力が0なのだから装置から一切仕事を取り出すことはできない。 ピストンにかかる力を増やしていって、ちょうど気体の膨張する力とつりあったとき(この状態が準静的な状態なのだが)順方向と逆方向は50%、50%となる。 というより、装置どちらの向きにも積極的には動かないであろう。 気体とピストンは熱でゆらいでいるので、たまたまピストンが圧縮位置に達することがあれば装置は一回だけ順方向に動くが、これと同等の確率で膨張位置に達すれば一回だけ逆方向の動きが起こるだろう。 順方向の回数と逆方向の回数はトータルで等しくなり、取り出される仕事の大きさは平均で0となる。 この50%、50%の点より負荷を軽くすれば、つまりピストンにかかる力が気体の膨張する力より小さければ、気体の膨張が圧縮よりも起こりやすくなるので、装置が順方向に動く確率が上がる。 反対に負荷を重くすれば圧縮が起こりやすくなり、逆方向に動く確率が上がる。 注意すべきは、いかなる場合でも(ピストンにかかる力0の場合以外は)順方向だけ100%、逆方向だけ100%ということはありえないということだ。 順方向、逆方向はいつでも起こり得る。 ピストンにかかる力の大きさによって変化するのは、順逆の起こる確率なのである。 この確率が50%を越えるか否かによって、装置を長時間動かしたトータルで得られる仕事+-が決まる。 熱を仕事に変換する装置を考えるとき、最も重要なポイントは”装置の動く向き”である。 仕事->熱はエントロピーが増大する自然な向きなのに対して、熱->仕事は普通に考えればエントロピーが減少する不自然な向きだ。 仕事->熱となる”逆方向の動き”はあっても不思議はないが、熱->仕事の”順方向の動き”にはどこか無理がある、と疑うのが当然であろう。 しかしどういう理由か、この装置は順方向、逆方向両方が起こりえる仕掛けになっている。 なぜこうなるのか、本当の理由はさらに深く探る必要がある。 とりあえずここでの結論は「一回に取り出す仕事の大きさが小さいほど順方向に動きやすい」ということに留めておこう。
| ポイントその2 | |
|
この装置ではピストンが瞬時に動く必要がある。 ピストンが移動している間に気体分子が圧縮領域から出てしまうと困るからだ。 信号の伝達速度は有限だし、分子の移動より速くピストンを動かすなどということはなかなか考えにくい。 これには幾つかの解決策がある。 一つは、ピストンを2つ交互に用いる方法だ。 信号が順方向にハンドルに入ったら、分子を圧縮領域から逃がさないように、まっさきに新たなピストンを圧縮位置に置く。 その後、膨張位置にある前回用いたピストンをおもむろに取り外せばよい。 似たような方法だが、ピストン以外の補助的な板を用いて、まず気体を圧縮領域内に確実にロックしておいてからピストンの移動を行なってもよいだろう。 (ロック->ピストン移動->ロック解除という手続きを踏む。もちろんこれも可逆) 信号の伝達に時間がかかることを考慮して、圧縮領域をピストンを置く位置よりも多少狭めにとっておく配慮も必要だろう。 取り出される仕事が減りはするが、装置の設計にはゆとりが生じるだろう。
| ポイントその3 | |
|
これはあり得ることだ。 順方向の動きで、リカバーゲートを閉じるのは気体分子の役目である。 気体分子の熱運動はでたらめで、所定時間内に必ずピストンを押すという保証はない。 もし気体がピストンを押さずリカバーゲートが開きっぱなしだったら、信号は閉じているトラップゲートで反射して戻ってきて、ハンドルに逆から入ることになる。 つまり逆方向の動きが開始されることになる。 熱を相手にしているのだから、根本的に逆方向の動きをなくす方法は存在しない。 できるだけ逆方向の動きを減らすには、分子がピストンの最初の一押しをしやすいようにピストンにかかる負荷を軽くするなり、リカバーゲート<->トラップゲート間の経路長を増して信号の1往復の時間を増やす、等の工夫が必要だろう。
| ポイントその4 | |
|
この装置でもうひとつやっかいなのが、ピストン自身も熱運動しているということだ。 従って一点の”膨張位置”にピタリとピストンを止めるとか、ちょうど”圧縮位置”にピストンをもってくることはできない。 しかし、膨張位置や圧縮位置は何も一点である必要はない。 ある程度の広がりのある範囲、”膨張範囲”と”圧縮範囲”で構わない。 もし、ある範囲内で熱運動するピストンを一点に移動しなければならないのなら、熱運動を押さえ付けなければならないので余計な自由エネルギーを必要とするだろう。 しかし、同じ”範囲”から”範囲”への移動であれば特に自由エネルギーは必要ない。 ピストンの熱運動がハンドルを通じて信号に影響しないかとの懸念もありますが、これには解決策がある。 例えば、がっちりした断熱壁でできた箱に熱運動している物体が入っていたとして、この箱を移動したとしても箱に触れた手が熱運動するわけではないだろう。 あるいは、もしピストンが水平方向に熱運動するなら、水平方向にはノータッチのまま垂直方向から触れればよい。 熱運動する物体を移動するからといって、必ずしも移動する主体が熱運動の影響を受けるわけではないのである。 (実際こんな点でもつつきだすときりがない。箱の中でも重心は移動するはずだ・・・それならばあらかじめ重心移動を打ち消すようなバランサーを取り付ければよい、しかし・・・といった具合に。)
まだ他にもあやしいポイントは幾らでもあることと思う。 特に、ゲートやハンドルの具体的な構造について、ここでは特に触れなかった。 しかし、この場で”あやしいポイント”の全てについて答えるのはやめにしよう。 私自身もあれこれと色々考えたのだが、全ての疑問に答えるには具体的な装置の設計図を提示する以外にはないと悟った。 これは本論の分を越える。 本論の目的は「悪魔の装置がどんな原理で動くのか」を明らかにすることにある。 ここに掲げた「悪魔の装置第一号」にはまだまだ疑問や不満が残るが、仮想的な装置の子細な点にこだわるより、もっと原理的な側面を追求することにしよう。



